
【标签分配】OTA阅读笔记
OTA阅读笔记
OTA: Optimal Transport Assignment for Object Detection
1. 什么是标签分配
为了训练目标检测器,需要为每个anchor 分配 cls 和 reg 目标,这个过程称为标签分配或者正采样。
cls指分类置信度,reg指检测框的偏移量。
通常基于Anchor的目标检测器会生成大量的预先定义好的Anchor,这些Anchor的数量是要远多于ground truth box的数量的。
以YOLOv3为例,每一个gt box最终都会有一个对应的Anchor,找到自己对应的gt box的Anchor算作正样本,没有找到的,比如Anchor坐标处在背景当中的算作负样本,另外有一部分会被直接忽略。
标签分配:三个特征图一共 8 × 8 × 3 + 16 × 16 × 3 + 32 × 32 × 3 = 4032 个anchor。
正例:任取一个ground truth,与4032个anchor全部计算IOU,IOU最大的anchor,即为正例。并且一个anchor,只能分配给一个ground truth。例如第一个ground truth已经匹配了一个正例anchor,那么下一个ground truth,就在余下的4031个anchor中,寻找IOU最大的anchor作为正例。ground truth的先后顺序可忽略。正例产生置信度loss、检测框loss、类别loss。标签为对应的ground truth标签(需要反向编码,使用真实的(x, y, w, h)计算出(tx, ty, tw, th) );类别标签对应类别为1,其余为0;置信度标签为1。
负例:正例除外(特殊情况:与ground truth计算后IOU最大的anchor,但是IOU小于阈值,仍为正例),与全部ground truth的IOU都小于阈值(0.5)的anchor,则为负例。负例只有置信度产生loss,置信度标签为0。
忽略样例:正例除外,与任意一个ground truth的IOU大于阈值(论文中使用0.5)的anchor,则为忽略样例。忽略样例不产生任何loss。
这样产生的问题是:一个GT只分配一个anchor来进行预测,存在正样本太少的问题,在后面的工作中例如FCOS已经证明了,增加高质量的正样本数量,有利于检测模型的学习。
2. 为什么提出OTA?
使用人工规则的分配方法,无法考虑尺寸、形状或边界遮挡的差异性。
当处理模糊标签时 (一个anchor可能对应多个目标),对其分配任何一个标签都可能对网络学习产生负面影响。
OTA就是解决上述问题,以获得全局最优的分配策略。
3. OTA方法
3.1 最优传输问题(OT问题)回顾
松弛的蒙日问题
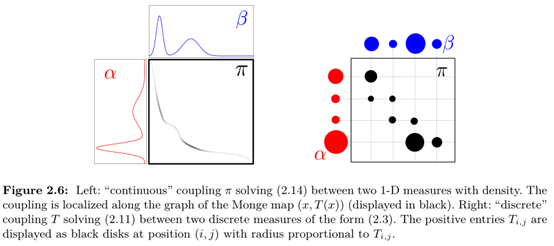
Kantorovich Relaxation的最优运输求解公式定义如下:

其中P表示符合所有行求和为向量a,所有列求和为向量b的一个映射。Pi,j表示从第i行映射到第j行的元素值,Ci,j表示完成Pi,j元素映射(或者说是运输)的运输代价。
3.2 Optimal Transport
假设第$i$个supplier拥有$s_i$个货物,第$j$个demander需要$d_j$个货物。
货物从supplier $i$运到demander $j$的成本为$c_{i,j}$。
目标是找到最佳运输方案$\pi^* = \pi_{i,j}|i = 1,2,…,m,j = 1,2,…,n$,可以让总的运输cost最低。
上述问题可以使用 Sinkhorn-Knopp算法来求解。
3.3 OTA思路
为了得到全局最优的分配策略,OTA方法提出将标签分配问题当作 Optimal Transport (OT) 问题。
具体来讲:
将每个gt当作可以提供一定数量labels的supplier,而每个anchor可以看作是需要唯一label的 demander,如果某个anchor从 gt 那儿获得足够的 label,那么这个 anchor就是此 gt 的一个正样本。
因为有很多anchor是负样本,所以还需引入另一个background供应商,专门为anchor提供 negative 标签,
问题目标是 supplier如何分配 label 给demander,可以让 cost 最低。其中 cost 的定义为:
- 对于每个anchor-gt pair,cost 为 pair-wise cls loss 和 pair-wise reg loss的加权和。
- 对于每个anchor-background pair,cost 为 pair-wise cls loss这一项。
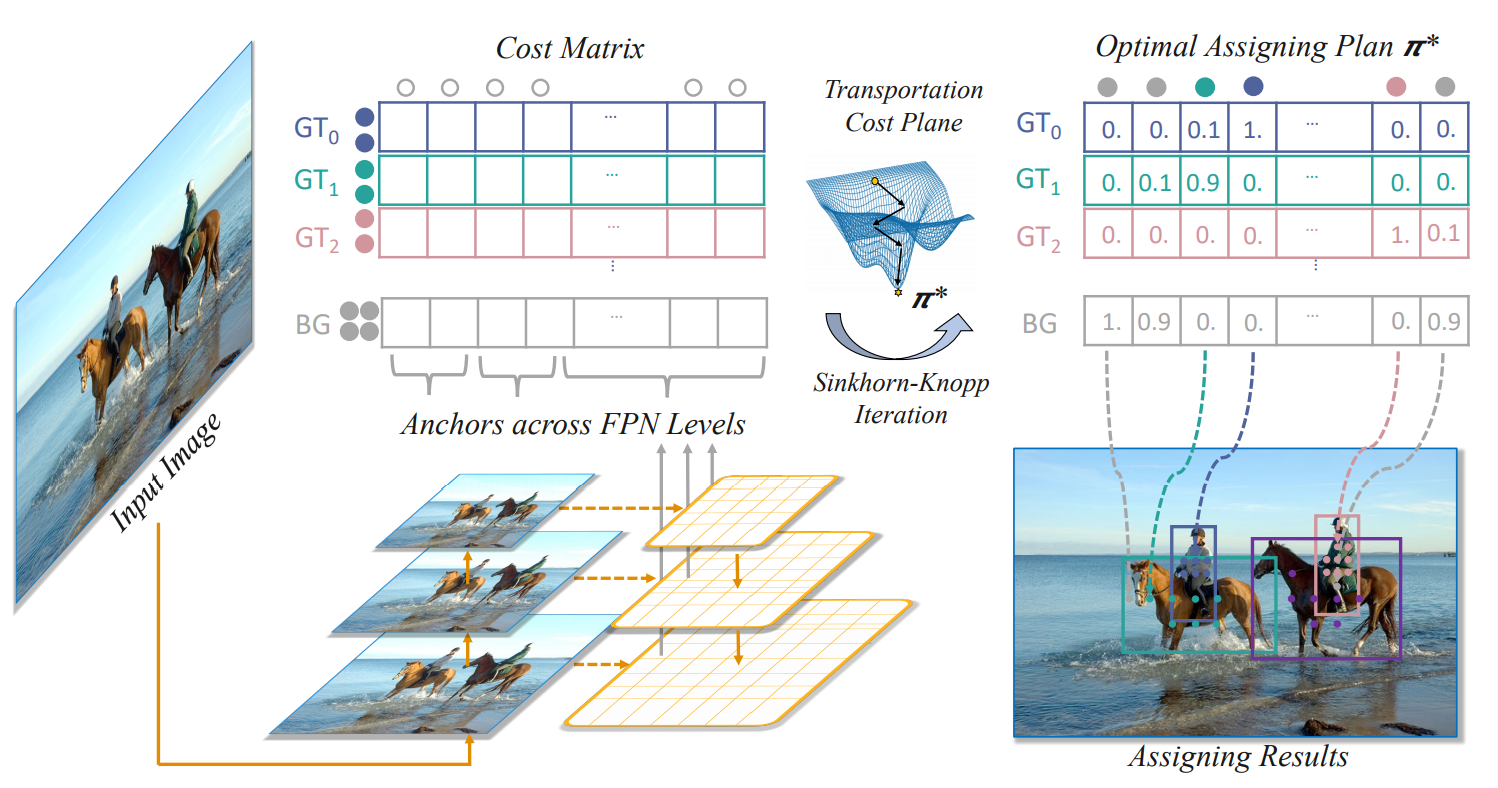
如上图所示,一张两个人骑马的图片,这张图片包含有四个gt box,其中彩色的点代表一些以该点为中心点的Anchor。我们要为这些彩色的点作标签分配,或者说正负样本匹配。
OTA算法的目的就是要通过对Cost Matrix矩阵使用Sinkhorn-Knopp最优传输迭代算法,找到一个使得”运输代价”Cost最小的一个传输矩阵$\pi$。传输矩阵$\pi$的形式,还是以上图为例,GT1给绿色点分配的label数量为0.9,给其他点分配的label数量则较少。
3.4 OT for Label Assignment
回到标签分配问题,对于一张图片,假设有 $m$ 个 gt 目标和 $n$ 个 anchors:
- 每个gt拥有$k$个positive lables,即$S_i = k;i = 1,2,…,m$
- 每个anchor需要一个lablel,即$d_j = 1;j = 1,2,…,n$
将一个positive label 从 $gti$运到anchor$a_j$的成本为$c^{fg}{ij}$,其可以表示为:
式中:
$P^{cls}_j$和$P_j^{cls}$分别表示对anchor $a_j$预测的cls score和bbox;
$G_i^{cls}$和$G_i^{box}$分别表示对$gt_i$的cls和bbox;
$L{cls}和L{box}$分别表示cross entropy loss和IoU Loss;
$\alpha$是2个Loss的平衡系数
此外很多anchor是负样本,所以还有一个background supplier,将一个negative label 从background supplier 运到 anchor $a_j$的成本为$c_j^{bg}$,其可以表示为:
可以计算出negative lables的总数为:$ n-m\times k$所以$s_i$更新为:
4. OTA实施细节
为了便于理解,我们假设:
- 一张图片上有 3个目标框,即 3个ground truth
- 项目有 2个检测类别,比如 cat/dog
- 网络输出1000个预测框,其中只有少部分是正样本,绝大多数是负样本
bboxes_preds_per_image是候选检测框的信息,维度是[1000,4]。预测框的四个坐标。
obj_preds 是目标分数(object score),维度是 [1000,1]。预测框是前景还是背景。
cls_preds 是类别分数,维度是 [1000,2]。预测框的2个检测类别的one-hot。
训练网络需要知道这 1000个预测框的标签,而如何分配标签呢?
先附一张原论文描述的整体流程图

使用OTA方法,可以分为4步,具体做法如下:
step1: 生成cost矩阵
OTA方法分配标签是基于cost的,因为有3个目标框和1000个预测框,所以需要生成 3 × 1000 3\times 10003×1000 的 cost matrix,对于目标检测任务,cost 组成为位置损失和类别损失,计算方法如下:
- 定位损失
计算 3个目标框,和 1000个候选框,得到每个目标框和 1000 个预测框之间的 iou(pair_wise_ious)。
再通过 -torch.log 计算得到定位损失,即 pair_wise_iou_loss,向量维度为[3, 1000]。3 是 3个真实框,每个都计算1000个值。
1 | pair_wise_ious=bboxes_iou(gt_bboxes_per_image,bboxes_perds_per_image,False) |
- 分类损失
通过第一行代码,将类别的条件概率(cls_preds:表示分类的概率)和目标的先验概率(obj_preds:是前景的概率)做乘积,得到目标的类别分数(两个乘积得到的)。再通过第二行代码,F.binary_cross_entroy 的处理,得到 3个目标框和1000个预测框 的综合loss值,得到类别损失,即 pair_wise_cls_loss,向量维度为 [3,1000]。3也是 3个真实框。其实这里就是算一个2分类交叉熵,cls_preds 和 真实框的 1 算下。每个真实框算1000次。
1 | cls_preds=(cls_preds_.float().unsqueeze(0).repeat(num_gt,1,1).sigmoid_()*obj_preds_.unsqueeze(0).repeat(num_gt,1,1).sigmoid_()) |
有了reg_loss和 cls_loss,将两个损失函数加权相加,就可以得到cost成本函数了。
cost 计算公式如下:
加权系数$\lambda=3$,计算代码如下:
1 | cost=pair_wise_cls_loss |
step2: dynamic_k_estimation
每个 gt 提供多少正样本,可以理解为“这个 gt 需要多少个正样本才能让网络更好的训练收敛”。
直觉上,每个gt 的大小、尺度和遮挡条件不同,所以其提供的positive albel数量也应该是不同的,如何确定每个gt的正样本数 $k$值呢,论文提供了一个简单的方案,该方法称之为:Dynamic k Estimation,具体做法如下:
从前面的 pair_wise_ious 中,给每个真实框,挑选 10个iou 最大的预测框。因为前面假定有3个目标,因此这里topk_ious的维度为[3,10]。 其实这里就是对于每个真实框选出来的 1000 个 IOU 值中选出来十个。

topk_ious 计算代码如下:
1 | ious_in_boxes_matrix = pair_wise_ious |
下面通过topk_ious的信息,动态选择候选框。dynamic_k_matching 代码如下:
1 | dynamic_ks = torch.clamp(topk_ious.sum(1).int(), min=1) |
针对每个目标框,计算所有anchor的 iou 值之和,再经过torch.clamp函数,得到最终右面的dynamic_ks值,给目标框1和3各分配3个候选框,给目标框2分配4个候选框。

step3: Sinkhorn-Knopp Iteration 求解 cost 矩阵获得 标签分配方案
有了cost矩阵,$c$,supplying vector $s \in R^{m+1}$,demanding vector $d \in R^n$,因此可以通过现有的最有传输迭代算法Sinkhorn-Knopp Iteration,对该OT问题进行求解,从而得到最优运输方案$\pi ^ \in R^{(m+1) \times n}$。在得到$\pi ^ $之后,将每个anchor分配给运送labels 量最大的supplier(真实框),从而解码出相应的标签分配方案。
step3: 得到matching_matrix(SimOTA中采用的简化版本)
1 | for gt_idx in range(num_gt): |
针对每个目标框挑选相应的 cost值最低的一些候选框。比如右面的matching_matrix中,cost值最低的一些位置,数值为1,其余位置都为0。
因为目标框1和3,dynamic_ks值都为3,因此matching_matrix的第一行和第三行,有3个1。而目标框2,dynamic_ks值为4,因此matching_matrix的第二行,有4个1。

step4: 过滤不同gt box共用的anchor候选框
1 | anchor_matching_gt = matching_matrix.sum(0) |
matching_matrix种第5列有两个1,这说明第5列所对应的候选框,被目标检测框1和2都进行关联。

因此对这两个位置,还要使用cost值进行对比,选择较小的值,再进一步筛选。假设第5列两个位置的值分别为0.4和0.3。

经过第三行代码,可以找到最小的值是0.3,即cost_min为0.3,所对应的行数,cost_argmin为2。
经过第四行代码,将matching_matrix第5列都置0。
再利用第五行代码,将matching_matrix第2行,第5列的位置变为1。
最终我们可以得到3个目标框,最合适的一些候选框,即matching_matrix中,所有1所对应的位置

5. OTA和SimOTA的区别
从上面描述可知,OTA 和 SimOTA 都是在经过 step2:dynamic_k_estimation 后,OTA 使用的是 Sinkhorn-Knopp Iteration 求解 cost 矩阵来获得最优的标签分配结果。SimOTA 是采用定义的规则使用 torch.topk 根据 dynamic_k_estimation 得到的 k ,选择 k 个 cost 最小的值,作为分配给真实框的 候选框。
因此,SimOTA 有两个 topk :1. step2:dynamic_k_estimation 中的选择比如 10 个 topk_ious。 2. 根据动态获得的 k 选择 k 个候选框。
OTA 只有 step2:dynamic_k_estimation 中的选择比如 10 个 topk_ious。
6. 参考链接
目标检测标签分配之 OTA 和 SimOTA 细节学习wise iou理心炼丹的博客-CSDN博客
【目标检测】YOLO系列Anchor标签分配、边框回归(坐标预测)方式、LOSS计算方式_zhicai_liu的博客-CSDN博客_yolo回归坐标
目标检测: 一文读懂 OTA 标签分配标签分配策略大林兄的博客-CSDN博客
深入浅出Yolo系列之Yolox核心基础完整讲解 - 知乎 (zhihu.com)
【目标检测】OTA: Optimal Transport Assignment for Object Detection 论文翻译和阅读 - cold_moon - 博客园 (cnblogs.com)




